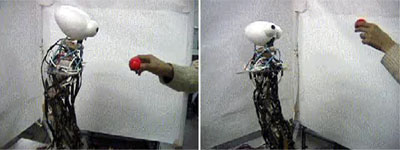
Original research: The mechanical design of Cyclops is based on research into a flexible spine robot* carried out at the Jouhou System Kougaku Laboratory, the University of Tokyo. The robot 'BeBe' is equipped with artificial air muscles placed by consultation of human muscle arrangement. They looked into how to control a redundant structure by using visual information feedback. The project was successful when performing the task under disturbance or under a restriction, using the redundancy. * T. Kawashima, I. Mizuuchi, H. Yamaguchi, S. Kagami, M. Inaba, and H. Inoue: "A Hyper-Redundant Spine-Type Robot with Pneumatic Artificial Muscles", Proc. of 1999 JSME Conference on Robotics and Mechatronics (ROBOMEC'99), 2A1-47-081, 1999 |